-

广州市粤吉装卸搬运有限公司
主营:高空车出租,升降车出租,云梯车租赁,登高车出租,吊篮车出租 - 13660676067

广州市粤吉装卸搬运有限公司
主营:高空车出租,升降车出租,云梯车租赁,登高车出租,吊篮车出租 11
11
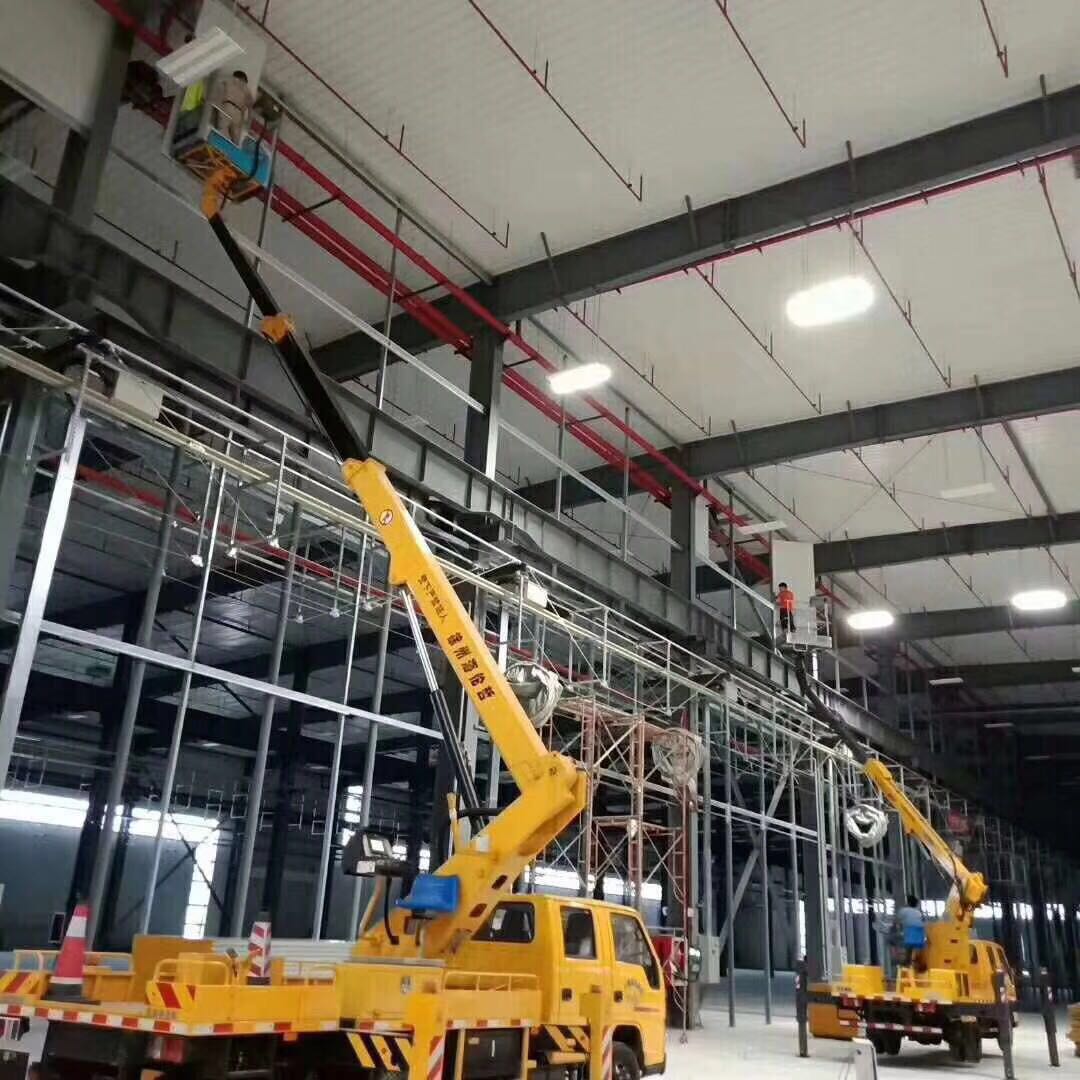
粤吉高空车租赁公司,中山高空车出租,不能盲目选购,要做好充分的市场调研,以及实地考察,确定其公司的规模以及其信誉程度。这是首要的也是必须的,现在市场许多小规模企业为了谋取偷工减料,从而使升降产品质量大大降低,虽然他们会卖的很便宜,但这种机械时间用的并不长,广州高空车租赁,而且危险系数大。因此,作为购买者不能贪图一点价格的小便宜而酿成更大的遗憾。 2、综合你所调查的资料,选择性价比比较好的高空作业车升降机械,要从它的技术参数以及实用性和通用性上进行选择,通常铝合金升降机械有很多种,包括(车载式升降机出租,固定式升降机,液压升降平台,剪叉式升降机出租等)每种的技术参数及用途都有些许不同,但也有许多功能有相似的地方,因此,作为顾客你要带有目的性的的选购,即你买升降机械式要做什么,以及哪种升降机械能满足你的需要并且用途多。 3、高空作业车出租设备到货后,开箱验收时要检查随机技术资料是否齐全,随机配件、工具、附件是否与清单一致,设备及配件是否有损伤、缺陷等,并做好开箱验收记录。我们是专业中山高空车租赁,中山高空车租赁公司,广州高空车出租 中山高空出租公司。
粤吉工程中会遇到各种各样的振动现象,振动在实际生活中一方面对我们有利,另一方面也会给我们带来毁灭性的事故。随着科学技术的快速发展,人们对产品结构的安全性能要求越来越高,对产品的要求也越来越严格,路灯安装车作为重要的检测工具之一更是如此,所以对检测车臂架进行模态分析是非常有必要的。模态分析是以振动理论为基础,以模态参数为目标的分析方法。在工程技术中已经得到广泛的应用。模态分析理论基础模态分析是以有限元法为基本理论,通过刚度矩阵求解节点位移可以将结构离散为多个自由度的振动。振动系统按照某一个固有频率进行的自由振动称为主振动,系统 进行主振动的振动形态称为模态。在模态理论中,具有个自由度的系统,运动微分方程:—系统的质量矩阵;一系统的刚度矩阵;—系统的阻尼矩阵;理坐标表述的位移列阵;一物理坐标表述的加速度列阵、速度列阵;—振力向量。均为实对称矩阵,为正定矩阵,而刚度矩阵可以是正定或半正定矩阵。在路灯安装车臂架结构中是为了求得主振型和固有频率,在无阻尼振动中为零矩阵,与此同时令激振力向量为零向量,即可以得到该系统的振动微分方程:⑶设系统的特解为:¢式中—自由响应的阶幅值列阵。将带入式得尺式有非零解的充要条件为:尺网系统的频率方程也就是特征方程,通过对矩阵进行坐标变换,解出固有频率。臂架模态计算利用大型有限元软件对路灯安装车臂架系统进行模态分析,求解臂架系统的固有频率及固有振型。常用模态提取法见表,综合考虑路灯安装车臂架自身的特点,臂架模态分析釆用分块法。
在模型中包含形状较差的实体和壳体单元时中低釆用较合适由壳或壳与实体组成的模型, 用于提取大模型的少数阶模态(阶以下适用于较好的实体及壳单元组成的模型低高日可用内存有**该法运行良好用于提取大模型的少数阶模态(阶以下适用于以上自由度模型的特征值快速求解对于网络较粗的模型只能得到频率近似值尚低复频情况时可能遗漏模态缩减法用于提取小模型的所有模态分块法采用稀疏矩阵方程求解器求解,求解速度很快。模态分析中,只有前几阶模态对机械结构性能影响比较大,所以只对路灯安装车臂架结构模态分析提取**阶固有频率和振型。路灯安装车主要是为检测人员检测桥梁提供一个作业平台。作业时,臂架结构处于工作状态,工作人员在工作平台上行走会对臂架产生振动激励,此振动激励的特性取决于人行载荷的特殊性。
一般情况下,人的慢走频率为快走频率为。利用以上有限元模型,在软件中,只对模型施加约束,采用分块法对路灯安装车臂架进行模态计算,得到臂架结构**阶固有频率。析通过对路灯安装车臂架结构模态计算结果分析,可以得到以下几点结论:在路灯安装车臂架工作状态下,工作人员行走的频率在到之间。从各阶固有频率表可以看出,一阶模态下人不会与臂架产生共振,二阶固有频率为其值在附近,较易触发共振现象。*三阶到*八频率都远大于,不易出现共振现象。对于较易出现共振现象的二阶模态,可以通过改变工作姿态进行适当的调整,如通过改变臂架伸长量、工作角度等避免。多数振型特点为平面内摆动,如:**阶振型到*四阶振型,*五阶振型为平面内摆动,*六阶振型到*八阶振型为上述两者的复合摆动。对于路灯安装车臂架系统的模态分析在本文中只考虑了作业人员对臂架系统的激励,而在路灯安装车臂架结构实际工作过程中,还有很因素会对臂架产生激励作用,如设备载荷、风载等,所以各阶固有频率和模态振型都会有一定范围的波动。小结本章在有限元模型中建立路灯安装车臂架结构,对较危险工况下进行静力学计算,结果表明此臂架结构满足强度、刚度要求,结构在静力学分析情况下处于安全状态;同时对臂架结构进行模态分析,并提取**阶固有频率及振型,结果表明人的行走频率不会激发结构共振,但是*二阶固有频率较接近人的行走频率,有一定的潜在危险,在工作中可通过改变工作姿态进行适当的调整,可通过改变臂架伸长量、工作角度等方式避免。